Bu yazımızda Mblock programını kullanarak iki Dc motor çalıştırarak tekerlek döndürme işlemini yapacağız: Öncelikle malzeme listemizi verelim.
Malzeme Listesi:
1-Arduino Uno
2-BreadBoard
3-2 adet dc motor
4-Jumper Kablolar
5-1 adet L298N motor sürücü modülü 6-1 adet 9v pil 7-2 adet dc motorun ucuna bağlayacağımız teker
Malzemelerine ihtiyacımız var.
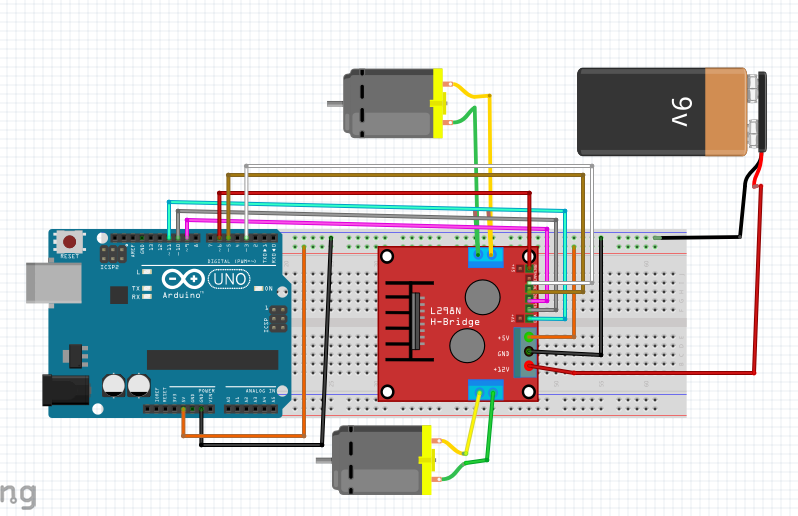
Bağlantı Şeması:
Öncelikle L298N motor sürücüsündeki 12V ucunu, 9v pilimizdeki (+) ucuna bağlıyoruz. Arduino Uno’daki GND Ucunfan çektiğimiz kablo ile pilimizdeki (-) ucu birleştirip L298N motorundaki GND ucunu bağlıyoruz. Motor sürücümüzdeki 5v ise arduino kartımızdaki 5V kısmına bağlıyoruz. Eğer, motorumuz sabit hızla gitmesini istmiyorsak motor sürücümüzdeki Enable uçlarında bulunan kelepçeleri kaldırıyoruz. Ortaya iki tane pin çıkacak. Öndeki pini jumper kablo ile arduino kartımızdaki PWM pinlerinden birine bağlıyoruz ben 11 PWM(ENA ucu) ve 6 PWM(ENB ucu) pinine bağladım.(Eğer sabit hızda çalışacaksa motor bu Enable(ENA,ENB uçlarını kullanmanıza gerek yok) Sonra N1, N2,N3 ve N4 uçlarından kablo ile arduino kartımıza bağlantı kuruyoruz. Motorumuzun uçlarını Out1, Out2, Out3 ve Out4 uçlarına bağlayalım. Bağlantı sıralaması önemli değil.
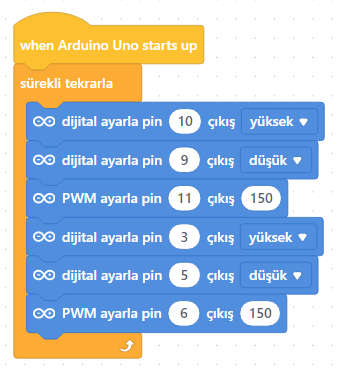
Kod Kısmı:
Mblock programında öncelikle aygıtlar kısmına bakıyoruz ve arduino uno aygıtı var mı yok diye. Eğer, arduino uno yoksa onu ekliyoruz. Sonrasında, Olaylar menüsünden Arduino uno başladığında başlangıç kodunu ekliyoruz. Kontrol menüsünden sürekli tekrarla kodunu ekledikten sonra iç kısmına Motorun ucuna bağladığımız uçların ikisine aynı anda enerji veremeyiz yoksa hareketsiz kalır. O yüzden uçların birine enerji verirken diğerine vermeyeceğiz. Her iki motorun hızını 150 ayarlayıp pinlere enerji verdik. Arduino uno’muzun kartını bilgisayara bağladıktan sonra Bağlan’a tıklıyoruz sonra yükle butonuna basarak, yazdığımız kodları arduino kartımıza göndermiş yüklemiş oluruz. Böylece programımız çalışmaya hazır bir hal alır. Not: tekerlerin dönüş yönü dikkate alınmadı. Aynı yönde dönmesini istiyorsanız pinlerin enerjilerini düşürüp yükseltip deneyerek tekerlerin aynı yönde dönmesini sağlayabilirsiniz.
Neden VIN Yerine 5V Pini? Eğer L298N’den çıkan 5V kablosunu Arduino’nun VIN girişine takarsan; Arduino’nun kendi regülatörü de çalışmaya çalışır. Ancak VIN girişi, voltajı düşürmek için paya (yaklaşık 1.5V) ihtiyaç duyar. Yani sen VIN’e 5V verdiğinde, Arduino’nun işlemcisine ulaşan voltaj 3.5V civarına düşer.
Sonuç: Robotun çalışıyor gibi görünse de sensör eklediğinde sapıtabilir, Bluetooth modülü takarsan kopmalar yaşayabilirsin veya pil biraz zayıfladığında Arduino sürekli kendini resetler.
Eğer şu anki gibi Pilden VIN’e gidersen: Tek pil kullandığın için motorlar çalıştığında anlık voltaj düşüşü olur (özellikle 9V pil kullanıyorsan). Bu dalgalanma doğrudan Arduino’nun regülatörüne yansır ve robotun aniden durmasına (reset atmasına) sebep olabilir. L298N üzerinden gelen 5V daha kararlıdır.
İki DC Motor Çalıştırma – Mblock ile Arduino Programın kodlarını indirmek için TIKLAYINIZ